Next: The Division of the Up: Lines, Planes, and Hyperplanes Previous: Line in Polar Coordinates
It is possible to generalize the discussion of lines to planes and hyperplanes in space
 . As with lines, there exists an implicit and homogeneous form of the equation of a plane understood as the locus of points expressed by the coordinate
. As with lines, there exists an implicit and homogeneous form of the equation of a plane understood as the locus of points expressed by the coordinate
 homogeneous to
homogeneous to
 :
:
 |
(1.48) |
The scalar product between homogeneous coordinates always encodes hyperplanes.
Homogeneous coordinates are known up to a multiplicative factor, and therefore an optional constraint can be imposed: similar to lines, one can think that the first  parameters of the homogeneous coordinate form a unit-length vector.
parameters of the homogeneous coordinate form a unit-length vector.
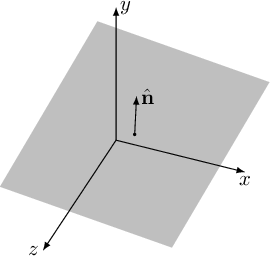
A generic plane, or hyperplane, is thus the set of points
that satisfy the condition
 is the normal to the plane and
is the normal to the plane and  if and only if the plane passes through the origin. In the case of
if and only if the plane passes through the origin. In the case of  , an alternative representation of the plane is
, an alternative representation of the plane is
 a generic point of the plane from which the correspondence
a generic point of the plane from which the correspondence
 can be derived.
can be derived.
It should be remembered that the degrees of freedom are always and only .
When introduced, the normalization constraint
 represents a particular case: under this condition, as in the case of lines,
represents a particular case: under this condition, as in the case of lines,  assumes the meaning of the minimum Euclidean distance between the plane and the origin.
assumes the meaning of the minimum Euclidean distance between the plane and the origin.
If the plane (or hyperplane) is normalized, the distance between a generic point  and the plane is measured as
and the plane is measured as
 .
.
The point  closest to a generic point belonging to the hyperplane is found at the intersection of the line directed by
closest to a generic point belonging to the hyperplane is found at the intersection of the line directed by  passing through and the plane itself:
passing through and the plane itself:
 |
(1.53) |
As for the various methods for generation, in section 3.6.3 it will be shown how to obtain the least squares regression of a set of points to the plane equation.
As in the case of the line, the parameters of the plane in  can also be expressed using 3 polar coordinates (azimuth, zenith, and ):
can also be expressed using 3 polar coordinates (azimuth, zenith, and ):
Paolo medici