
GOLD: a Parallel Real-Time Stereo Vision System for Generic Obstacle
and Lane Detection
This Project has been supported by Italian CNR through the
`Progetto Finalizzato Trasporti 2'.

|
- size 500k
- 65 frames
- 256x256 color images
|
|
The GOLD (Generic Obstacle and Lane Detection)
system is a stereo vision-based hardware and software system to be
used on moving vehicles to increment road safety.
It is based on the full-custom massively parallel architecture
PAPRICA,
and it allows to detect both generic obstacles (without constraints on
symmetry or shape) and the lane position
in a structured environment (with painted lane markings).
The output of the processing is displayed on both an on-board monitor and a
control-panel to give visual feedbacks to the driver.
The system has been tested both in laboratory and on board of the
MOB-LAB
experimental land vehicle and demonstrated its robustness
with respect to shadows and changing illumination conditions,
different road textures, and vehicle movement.
How does the system work?
The localization of obstacles in front of the vehicle is performed by
the processing of pairs of stereo images, while lane detection is based
on a pattern-matching technique which relies on the presence of road
markings.
Both functionalities share the same underlying approach, the Inverse
Perspective Mapping. Such a technique is based on a transform that,
given a model of the road in front of
the vehicle (e.g. flat road), remaps
both stereo images into a common domain;
any disparity
in the remapped images is due
to a deviation from the road model, thus making
possible to detect potential
obstacles.

left image
| 
right image
|

left remapped image
| 
right remapped image
|

difference image
|

the result of obstacle detection
|
Moreover in the remapped domain the detection of lane markings
is extremely simplified since they can be devised as almost vertical
lines with constant width. In fact the remapped image represents a
bird's eye view of the road surface, allowing lane markings detection
through an extremely simple and fast morphological processing.

the acquired image |
the remapped image |

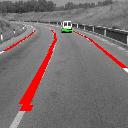
the result of the
morphological processing |
 |
 |
the extraction of the road
geometry |
the result of lane detection |
|
Furthermore, since both functionalities are based on the processing of
images remapped into the same domain, the fusion of the result of the
two processings is straightforward.
When one or more obstacles are detected,
their position and size are
given as input to the lane detection
algorithm.
The obstacle area is not considered during
the lane detection process thus avoiding
the risk that the obstacle shape
could be confused by a part of a lane marking.
References:
-
Massimo Bertozzi and Alberto Broggi,
GOLD: a
Parallel Real-Time Stereo Vision System for Generic Obstacle and Lane
Detection, IEEE Transactions on Image Processing, 1997,
In press.
-
Massimo Bertozzi, Alberto Broggi, and Alessandra Fascioli, A Stereo Vision
System for Real-Time Automotive Obstacle Detection, In Proceedings
ICIP - Third IEEE International Conference on Image Processing,
Lausanne, CH, September 16-19 1996. IEEE Signal Processing Society,
Postscript version of the paper.
-
Massimo Bertozzi, Alberto Broggi, and Alessandra Fascioli,
Real-Time Obstacle Detection using Stereo
Vision, In Proceedings EUSIPCO-96 - VIII European Signal
Processing Conference, Trieste, Italy, September 10-13 1996.
Postscript version of the paper.
-
Massimo Bertozzi, Alberto Broggi, Denis Colla and Alessandra Fascioli,
Sensing of automotive environment using stereo vision,
In Proceedings 30th ISATA (International Symposium on Automotive
Technology and Automation) Conference - Special Session on Machine Vision
for Intelligent Vehicles and Autonomous Robots, Florence, Italy, June
16-19 1997.
Postscript version of the paper.
Alessandra FascioliLast update: Mar 15 1997
{kind=link}