Next: Homogeneous Coordinates Up: Alternative Parametrizations in Space Previous: Polar Coordinates
A fairly common alternative to parameterize the sphere  is to use stereographic projection to transform coordinates from the manifold space
is to use stereographic projection to transform coordinates from the manifold space
 (parameter space) to
(parameter space) to
 (Cartesian space) and vice versa.
(Cartesian space) and vice versa.
In the three-dimensional sphere  , a function
, a function  can be defined as the stereographic projection from space
can be defined as the stereographic projection from space
![$U_{+3} := S^2 /\ \left[0,0,1\right]^{\top}$](img119.svg) to
to
 :
:
 |
(1.20) |
![\begin{displaymath}
\varphi_{+3}^{-1} \left( \left[u,v \right]^{\top} \right) =...
... \begin{bmatrix}
2u \\
2v \\
-1 + u^2 + v^2
\end{bmatrix}\end{displaymath}](img122.svg) |
(1.21) |
![$\left[0,0,1\right]^{\top}$](img123.svg) denotes the "north pole" of the sphere.
and
denotes the "north pole" of the sphere.
and
 are continuous in
are continuous in  , thus the stereographic projection is a homeomorphism.
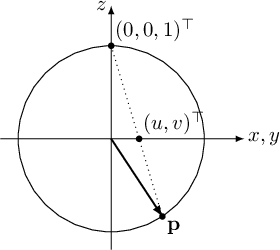
In this projection, a relationship is established between the point
, thus the stereographic projection is a homeomorphism.
In this projection, a relationship is established between the point  on the plane
on the plane  and the point on the sphere
and the point on the sphere  , the intersection between the projective line connecting the origin
, the intersection between the projective line connecting the origin
 (the only point of singularity) with the point on the plane and the unit sphere, as shown in figure 1.3.
(the only point of singularity) with the point on the plane and the unit sphere, as shown in figure 1.3.
Similarly, spaces
 can be defined where the
can be defined where the  are the unit vectors within which to define 6 similar parameterizations (each with its own distinct singularity), allowing the selection of the most appropriate parameterization to operate at the point furthest from the singularity of that specific formula.
are the unit vectors within which to define 6 similar parameterizations (each with its own distinct singularity), allowing the selection of the most appropriate parameterization to operate at the point furthest from the singularity of that specific formula.
Paolo medici