
What is the DARPA Grand Challenge?
DARPA intends to conduct a
challenge of autonomous ground vehicles through a
course
between Los Angeles and Las Vegas (225 to 250 miles) in the fastest time
and in less than 10 hours
in March of 2004. A cash award of $1 million will be granted to the team
that fields the first vehicle to complete the designated route within a
specified time limit. The purpose of the challenge is to leverage American
ingenuity to accelerate the development of autonomous vehicle technologies
that can be applied to military requirements.
Only publicly available signals (e.g., GPS) may be used for navigation.
Otherwise, the vehicle must be fully autonomous, receiving no other
signals for navigation, path planning, obstacle avoidance, and terrain
differentiation. Many of the details of the event are still being
developed. Click
here
for more information.
The attributes of the race can be summarized with the following points:
The off-road locations and speed requirements (about 25 mph average for 10 hours) are presently beyond any state-of-the-art demonstration we have heard of. The locations between LA and Las Vegas provide particular problems (see examples on next page). This is a true challenge!
Grand Challenge Rules:
Grand Challenge Schedule:
| Feb 22, 2003 | Grand Challenge Conference |
| Apr 01, 2003 | Application Period Opens |
| Oct 14, 2003 | Application Period Closes |
| Mar 11, 2004 | DARPATech Ceremonial Start |
| Mar 12, 2004 | Qualification Inspection & Demonstration |
| Mar 13, 2004 | Grand Challenge Main Event |
What is ION?
ION stands for "Intelligent Off-road Navigator".
Background and Experience:
The Ohio State University has a long history in the field of autonomous vehicle research and development. A number of early developments in automotive automation were carried out under the direction of Professor Robert Fenton in the mid 1970s, including vehicle following using a take-up reel to simulate an unavailable distance sensor and steering control using leaky-coax cables embedded into the road. More recently, OSU has participated actively in this area under the direction of Professor Umit Ozguner and his team. This research has involved vehicle steering and speed control, sensor development, sensor fusion, GPS and INS sensing and navigation technologies, mapping technologies, and wireless communications.
For four years we fielded a student projects team that competed in the International Unmanned Ground Vehicle Competition, a competition that we won in 1996 using a golf-cart based platform equipped with steer and throttle by wire actuation, an OSU developed image processing system for lane tracking, and ultrasonic rangefinders for obstacle avoidance.
Based on previous work instrumenting and actuating passenger vehicles, we were invited to participate in the 1997 NAHSC Automated Highway Systems Demonstration on I-15 in San Diego, CA. For that event, we developed three fully autonomous vehicles capable of lateral and longitudinal control at highway speeds. The platforms were Honda Accord automobiles, modified by Honda to provide drive by wire electronic steering and throttle and brake by wire acceleration control to our specifications. (See below.)
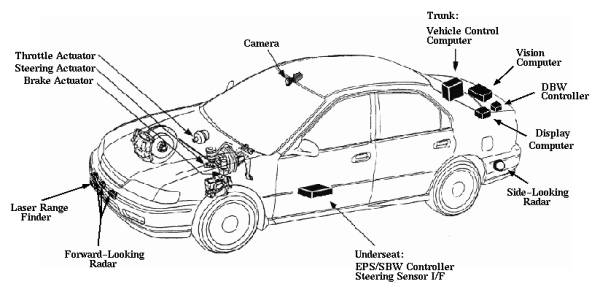
The vehicles were outfitted with a number of sensors, included an OSU developed image processing system for lane tracking and an OSU developed radar system that provided both radar-reflective stripe tracking for lateral position sensing and forward target detection for vehicle following and obstacle detection. In addition, the vehicles were equipped with a prototype scanning laser rangefinders for vehicle following and forward obstacle detection, and side looking short distance microwave proximity detectors for safety during lane change and vehicle passing maneuvers. All critical sensing tasks were accomplished using multiple cooperating technologies and sensor modalities to provide redundancy. At that time, the control was implemented on dSpace embedded control computers and an OSU developed software kernel.
Since that time, we have re-implemented the vehicle control and sensor management software on an Intel-based industrial single board computer using QNX, a real time multitasking operating system that also provides support for GUI development. We have also implemented a map based vehicle navigation control system (including both lateral guidance and desired speed control) using positioning feedback from the fusion of differential GPS and INS measurements. We have continued to improve our image-based lane tracking algorithms, and we have implemented a vehicle following electronic tow-bar control system in which lateral and longitudinal control are based on tracking a visual tag affixed to a lead vehicle. Much of this was demonstrated at the 1999 ITS America AVCSS Demonstration.
Our research group has experience designing low-level control strategies for lateral and longitudinal control. We have experience implementing or using a number of sensing technologies, and we understand the issues in the processing and extraction of data for control purposes from raw sensor data. We also have experience in data fusion from multiple sensors, a technology that, we feel, is critical to successful, reliable autonomous vehicle operation.
We also have access to and experience with GIS mapping data and technologies. For example, we have developed the hardware and software for GPS based tracking of transit vehicles and the real-time estimation and display of vehicle arrival time, which has been implemented both on the OSU campus and the Central Ohio Transit Authority.
Moreover, our experiences in conducting previous public demonstrations have given us a great deal of insight into the administrative and legal aspects of these activities, and into the issues and requirements concerning safety, fault tolerance and failure modes, and the reliability of components.
Finally, we also have an active relationship with the Transportation Research Center in East Liberty, OH. This facility provides on and off road testing capabilities that could be utilized in this project.
![]()